树
基本概念
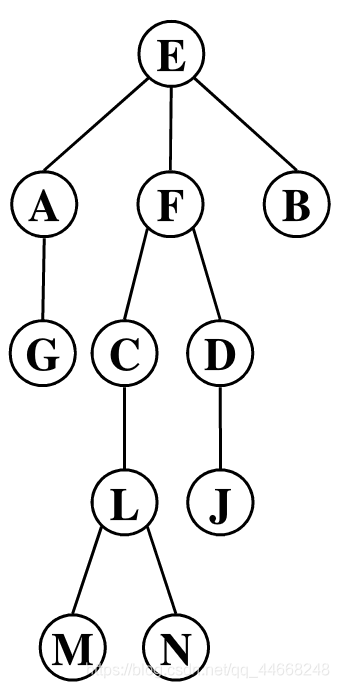
结点
边:根节点和子树跟之间
路径:从某个结点可达另一个结点(树有向:双亲$\rightarrow$孩子)
树路径长度:路径总和
结点关系
双亲:该结点上连的点
孩子:该结点下连的点
兄弟:有共同双亲的结点
堂兄弟:双亲为兄弟的结点
后裔:子树的所有结点
祖先:向上到根结点所有的点
度
结点的度:结点的子树数
叶子:度为0的结点
分支节点:度不为0的结点
树的度:结点度最大值
树的高度
- 树的层次:树根为第一层
- 树的高度:最大层次
有序/无序
- 左右子树可/不可互换
树的性质
结点数$n$、度数$m$、高度$h$、层数$i$,总分支$k$
- $n=\sum m+1$
- $n(i)\le m^{i-1}$
- $h+m-1\le n\le\dfrac{m^h-1}{m-1}$
- $⌈\log_m(n(m-1)+1)⌉\le h\le n-m+1$
- $k=n_1+2n_2+\cdots+mn_m=n-1$
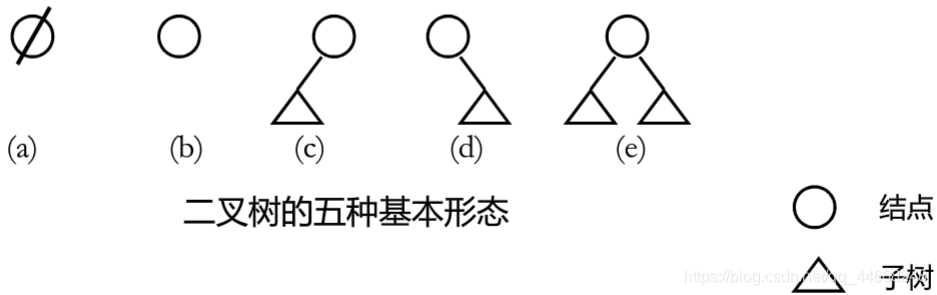
二叉树
二叉树性质
- $n(i)\le2^{i-1}$
- $n\le 2^{h}-1$
- $⌈\log_2(n+1)⌉{\leq}h{\leq}n$
- $n_0=n_2+1$
- 有$n+1$个空指针
特殊二叉树
满二叉树
高度为$h$,且$2^h-1$结点
- 满二叉树一定是完全二叉树,也是扩充二叉树
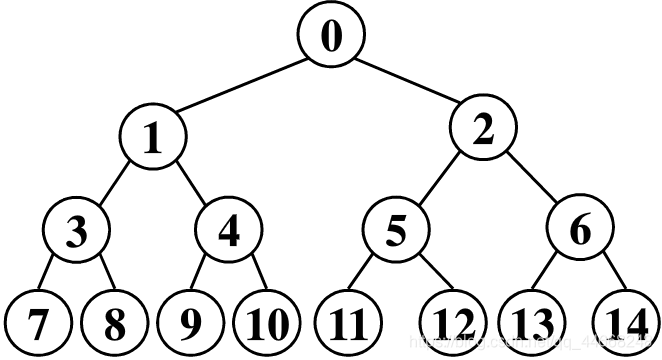
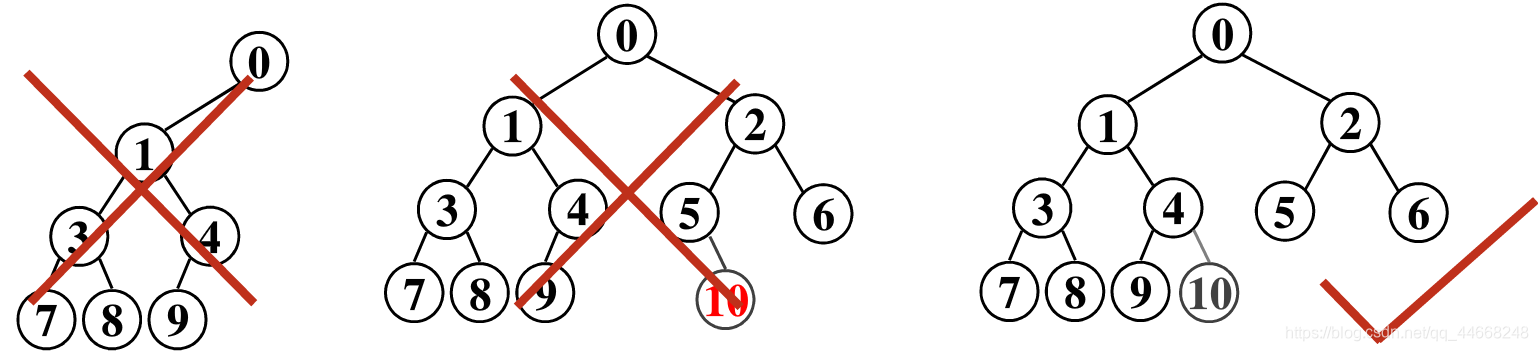
完全二叉树
- 除最下面两层度小于$2$,其他层结点度均为$2$
- 最下一层叶结点均依次集中在靠左若干位置
完全二叉树高度$h=[log_2(n+1)]$
所在层数:$i=⌊\log_2n⌋$
由上到下、由左到右、从$0$编号
根——$i=0$
双亲——$[\dfrac{i-1}{2}]$
左孩子——$2i+1$
右孩子——$2i+2$
$n_0=n(i>⌊\dfrac2n⌋)$
$n_1$只能取$0$或$1$
若$n_1=1$,则该结点有左子无右子
扩充二叉树(2-树)
- 除叶子结点,必须有两个孩子
- 仅有度$2$和$0$的结点,不存在度为$1$的结点
二叉排序树
左结点 $<$ 根结点 $<$ 右结点
平衡二叉树
$\left|h_{左}-h_{右}\right|\le1$
代码
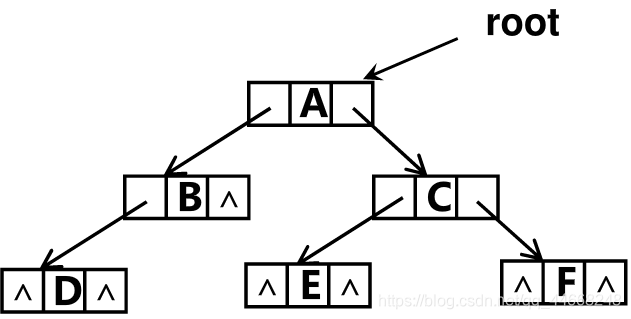
链接表示
typedef struct BiTNode{
ElemType data; // 数据域
struct BiTNode* lChild; // 左孩子指针
struct BiTNode* rChild; // 右孩子指针
}BiTNode, *BiTree;- 在$n$个结点的二叉链表中,有$n+1$个空链域
创建空二叉树
void Create(BinaryTree *bt)
{
bt->root = NULL;
}创建新结点
BTNode* NewNode(ElemType x, BTNode *ln, BTNode *rn)
{
BTNode *p = (BTNode*)malloc(sizeof(BTNode)); // 申请空间
p->element = x; // 结点内容赋值
p->lChild = ln; // 左子树赋值
p->rChild = rn; // 右子树赋值
return p;
}返回根结点
BOOL Root(BinaryTree *bt, ElemType *x)
{
if(!bt->boot) // 空树
return FALSE;
else
{
*x = bt->root->element; // 赋值
return TRUE;
}
}构造二叉树
void MakeTree(BinaryTree *bt, ElemType e, BinaryTree *left, BinaryTree *right) // bt:根地址 e:根值 left:左子树 right:右子树
{
if(bt->root || left==right)
return;
bt->root = NewNode(e,left->root,right->root);
left->root = right->root = NULL;
}遍历
先序遍历+后序遍历不可确定二叉树:$\left. \begin{array}{r} \text{前序}XY\\ \text{后序}YX\\ \end{array} \right\} \Rightarrow X$为$Y$祖先
先序遍历
步骤:
先访问根结点
先序遍历左子树
先序遍历右子树
特性
- 最先访问的是根结点
- $n$个元素先序遍历二叉树共$\dfrac{\text C^n_{2n}}{n+1}$
递归代码
void PreOrder(BiTree T) // 先序遍历递归函数
{
if(!T) // 树空了直接返回
return;
visit(T); //访问根结点
PreOrder(T->lChild); // 先序遍历左子树
PreOrder(T->rChild); // 先序遍历右子树
}时间复杂度:$O(n)$
非递归代码
void PreOrder(BiTree T){ // 中序遍历
InitStack(S); // 初始化栈
BiTree p = T; // 结点指向根结点
while(p || !IsEmpty(S)){ // 当p存在且栈不空
if(p){ // 若p存在,入栈且前往左孩子
visit(p);
push(S, p);
p = p->lchild;
}
else{ // 若p不存在则出栈访问且前往右孩子
Pop(S, p);
p = p->rchild;
}
}
}中序遍历
步骤
- 中序遍历左子树
- 访问根结点
- 中序遍历右子树
特性
- 左子树中所有结点先于根结点
- 右子树中所有结点后于根结点
递归代码
void InOrder(BiTree T) // 中序遍历递归函数
{
if(!t) // 树空了直接返回
return;
InOrder(T->lChild); // 中序遍历左子树
visit(T); //访问根结点
InOrder(T->rChild); // 中序遍历右子树
}时间复杂度:$O(n)$
非递归代码
void InOrder(BiTree T){ // 中序遍历
InitStack(S); // 初始化栈
BiTree p = T; // 结点指向根结点
while(p || !IsEmpty(S)){ // 当p存在且栈不空
if(p){ // 若p存在,入栈且前往左孩子
push(S, p);
p = p->lchild;
}
else{ // 若p不存在则出栈访问且前往右孩子
Pop(S, p);
visit(p);
p = p->rchild;
}
}
}后序遍历
步骤
- 后序遍历左子树
- 后序遍历右子树
- 访问根结点
特性
- 最后访问根结点
代码
void PostOrder(BiTree T) // 后序遍历递归函数
{
if(!t) // 树空了直接返回
return;
PostOrder(T->lChild); // 后序遍历左子树
PostOrder(T->rChild); // 后序遍历右子树
visit(T); //访问根结点
}时间复杂度:$O(n)$
非递归算法
/**/
void postOrder(BTNode T){
if(!T)
return;
InitStack(S); // 辅助遍历栈
BiNode p = T;// p指向根结点
r = NULL; // 记录最近访问的结点
while(p || !IsEmpty(s)){ // 当p存在且栈不空
if(p){
push(S, p); // 根结点结点入栈
p = p->lChild; // 访问左孩子
}
}else{
getTop(S, p); // 读取栈顶元素(不出栈)
if(p->rChild && p->rChild != r) // 右子树存在且从未被访问
p = p->rChild; // 转向右子树
else{
pop(S, p); // 出栈
visit(p->data); // 访问该结点
r = p;
p = NULL; // 重置
}
}
} 层次遍历
步骤
若二叉树为空,直接退出
否则,初始化队列
再将根结点进队
若队列不为空
- 获取队头结点$p$,并将队头结点出队
- 访问结点$p$中的数据
- $p$的左孩子进队
- $p$的右孩子进队
代码
void LevelOrderTree(BiTree *T)
{
Queue Q; // 存储BTNode结点类型指针的队列
BTNode p = T;
if(!T) // 二叉树为空
return;
Create(&Q, T); // 初始化队列
EnQueue(&Q, T); // 根结点进队
while(!IsEmpty(&Q))
{
DeQueue(Q,p); // 获取队头结点
visit(p); // 访问结点p
if(p->lChild)
EnQueue(Q,p->lChild); //若左孩子存在,则进队
if(p->rChild)
EnQueue(Q,p->rChild); //若右孩子存在,则进队
}
Destroy(&Q); // 销毁队列
}线索二叉树
目的:加快二叉树遍历(加快查找结点前驱后驱)
- 先序线索二叉树:查找先序后继,
先序前驱 - 后序线索二叉树:查找后序前驱,
后序后继
结构:物理结构(链表)
线索个数:$n+1$
空链域:$2$
存储结构
| lChild | ltag | data | rtag | rchild |
- $\text{ltag}=\left\{ \begin{array}{l} 0\ \ \text{lchild指向左孩子}\\ 1\ \ \text{lchild指向前驱}\\ \end{array} \right. $
- $\text{rtag}=\left\{ \begin{array}{l} 0\ \ \text{rchild指向右孩子}\\ 1\ \ \text{rchild指向后驱}\\ \end{array} \right. $
typedef struct ThreadNode{
ElemType data; //数据域
struct ThreadNode* lchild; // 左孩子
struct ThreadNode* rchild; // 右孩子
int ltag; // 左指标
int rtag; // 右指标
}ThreadNode, *ThreadTree;前序遍历线索树
void preThread(TBNode *p, ThreadTree &pre){
if(p){
if(!p->lchild){ // 左子树为空,建立前驱结点
p->lchild = pre;
p->ltag = 1;
}
if(pre && !pre->rchild){ // 建立前驱结点后继搜索
pre->rchild = p;
pre->rtag = 1;
}
pre = p; // 标记当前结点为刚刚访问的结点
preThread(p->lchild, pre);
preThread(p->rchild, pre);
}
}中序遍历线索树
void InThread(ThreadTree &p, ThreadTree &pre){ // P:正在访问的结点;pre:刚刚访问的结点
if(p){
InThread(p->lchild, pre); // 递归线索化左子树
if(!p->lchild){ // 左子树为空,建立前驱结点
p->lchild = pre;
p->ltag = 1;
}
if(pre && !pre->rchild){ // 建立前驱结点后继搜索
pre->rchild = p;
pre->rtag = 1;
}
pre = p; // 标记当前结点为刚刚访问的结点
InThread(p->rchild, pre); // 线索化右子树
}
}
void CreateInThread(ThreadTree T){
ThreadTree pre = NULL; // 刚开始无刚访问的结点
if(T){
InThread(T, pre); // 线索化非空二叉树
pre->rchild = NULL; // 处理最后一个结点
pre->rtag = 1;
}
}后序遍历线索树
void postThread(ThreadTree &p, ThreadTree &pre){
if(p){
postThread(p->lchild, pre); // 递归线索化左子树
postThread(p->rchild, pre);
if(!p->lchild){ // 左子树为空,建立前驱结点
p->lchild = pre;
p->ltag = 1;
}
if(pre && !pre->rchild){ // 建立前驱结点后继搜索
pre->rchild = p;
pre->rtag = 1;
}
pre = p; // 标记当前结点为刚刚访问的结点
}
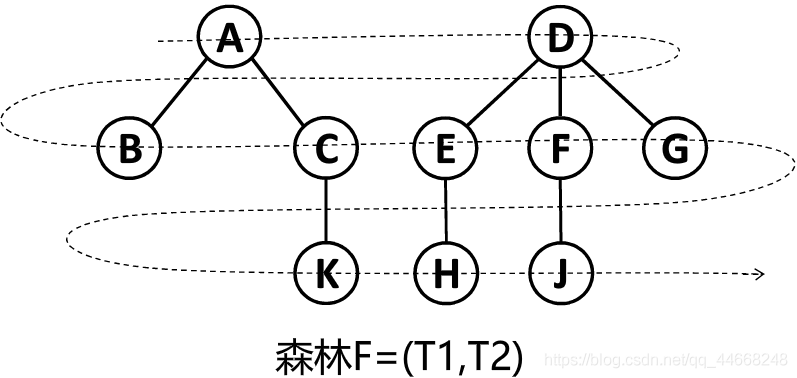
}森林
森林遍历
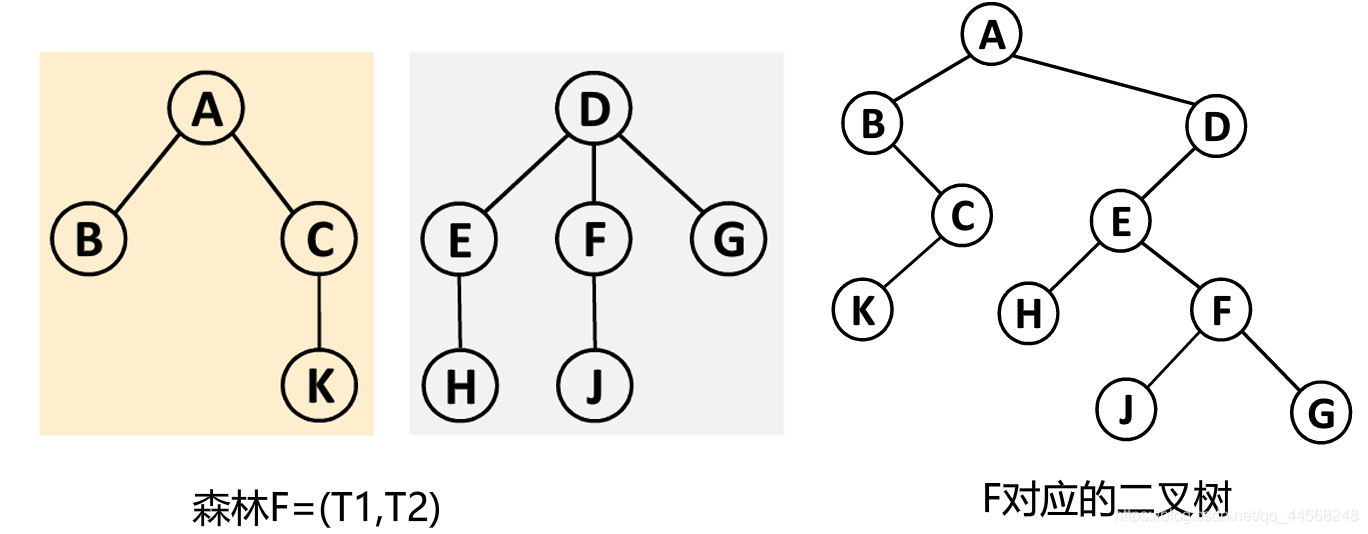
先序遍历
若森林为空,则结束
访问第一棵树根
第一棵树的根结点子树构成的森林
先序遍历其他树
- 先序遍历等于每棵树先序遍历简单拼接
中序遍历
若森林为空,则遍历结束;否则
- 中序遍历第一棵树的根结点的子树构成的森林
- 访问第一棵树的根
- 中序遍历其他树
- 中序遍历等于每棵树中序遍历简单拼接
后序遍历
若森林为空,则遍历结束;否则
- 后序遍历第一棵树的根结点的子树构成的森林
- 后序遍历其他树
- 访问第一棵树的根
- 后序遍历不等于每棵树中序遍历简单拼接
- 不常用
层次遍历
- 访问第一层所有结点
- 访问第二层所有结点
- $……$
堆
存储方式
- 最后一个叶子结点双亲位置——$[\dfrac{n-2}{2}]$
- 根结点位置——$0$
最小堆
每个结点数据小于等于孩子结点
最大堆
每个结点数据大于等于孩子结点
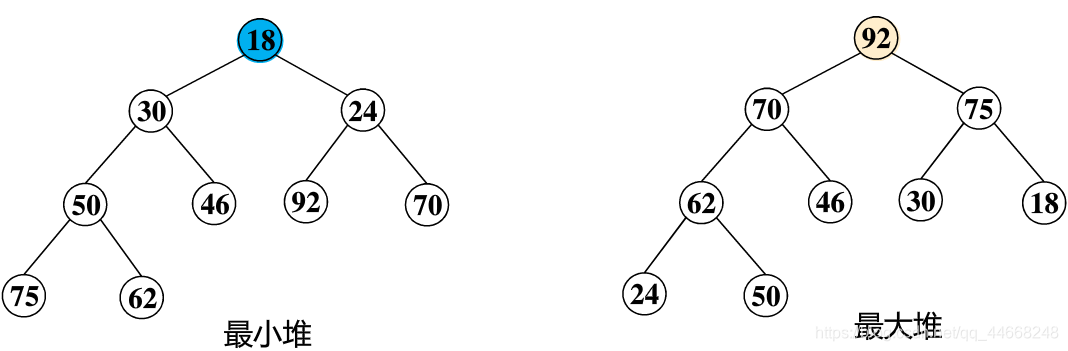
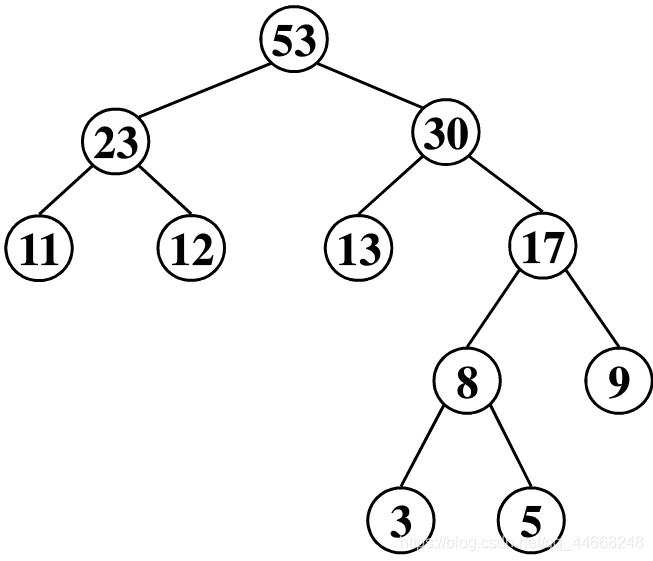
堆的判断

最小堆
$k_i{\leq}k_{2i+1}$和$k_i{\leq}k_{2i+2}$
最大堆
$k_i{\geq}k_{2i+1}$和$k_i{\geq}k_{2i+2}$
建堆运算
从最后叶子的双亲$k_{[\frac{n-2}{2}]}$反方向直到根结点$k_0$,依次对每个结点$k_i$
- 若该结点小于(大于)或等于其孩子,则结束
- 将该结点与与最小(大)孩子交换
代码
向下调整算法
void AdjustDown(ElemType heap[], int current, int border) // heap:存放序列数组 current:当前待调整序列中的位置 border:待调整序列的边界
{
int p = current;
int minChild;
ElemType temp;
while(2*p+1 <= border) // 若p不是叶结点
{
if((2*p+2 <= border) && (heap[2*p+1] > heap[2*p+2])) // 右孩子存在 右孩子较小
minChild = 2*p+2;
else // 右孩子不存在 或 右孩子较大
minChild = 2*p+1;
if(heap[p] <= heap[minChild]) // 若当前结点不大于其最小的孩子,结束
break;
else // 否则将p和其最小孩子交换
{
temp = heap[p] ; heap[p] = heap[minChild] ; heap[minChild] = temp;
p = minChild; // 当前下移元素的位置
}
}
}建堆算法
void CreateHeap(ElemType heap[], int n)
{
int i;
for(i=(n-2)/2 ; i>-1 ;i--) // 从最后一个叶结点的双亲反向到根结点
AdjustDown(heap,i,n-1); // 依次执行向下调整
}性能
建堆:$O(n)$
插入:$O(\log_2n)$
删除:$O(\log_2n)$
优先权队列
- 元素加入次序无关紧要
- 出队只取最高优先级的元素
实现方案
进队
- 将新元素放堆尾,并按照最小堆(或最大堆)进行调整$O(log_2n)$
出队
- 直接取出堆顶元素$O(1)$
- 按照最小堆(或最大堆)进行适当调整$O(log_2n)$
存储方式

代码
typedef struct priorityQueue
{
ElemType *element; // 存储元素数据
int n; // 元素个数
int maxSize; // 优先队列容量
}PriorityQueue;向上调整AdjustUp
代码
void AdjustUp(ElemType heap[], int current) // heap:最小堆数组 current:新元素位置
{
int p =current; // 让p指向新元素位置
ElemType temp;
while(p>0) // p指向根结点循环结束
{
if(heap[p] < heap[(p-1)/2]) // p指向元素小于其父节点,则与父节点交换
{
temp=heap[p] ; heap[p]=heap[(p-1)/2] ; heap[(p-1)/2]=temp;
p = (p-1)/2; // p向上移动至父节点位置
}
else // 若p指向结点不小于其父节点,则调整完毕
break;
}
}时间复杂度
$O(log_2n)$
优先权队列实现
创建空优先权队列
void CreatePQ(PriorityQueue *PQ, int mSize)
{
PQ->maxSize = mSize; // PQ最大容量赋值
PQ->n = 0; // PQ元素个数为0
PQ->element = (ElemType*)malloc(mSize*sizeof(ElemType)); // 申请空间
}销毁队列,释放空间
void Destroy(PriorityQueue *PQ)
{
free(PQ->element); // 释放数组空间
PQ->n = 0; // PQ元素个数为0
PQ->maxSize = 0; // PQ容量清零
}增加新元素
void Append(PriorityQueue *PQ, ElemType x)
{
if(IsFull(PQ)) //满队
return;
PQ->element[PQ->n] = x; // 优先权队列最后一个元素后面插入一个元素
PQ->n++; // 元素数量+1
AdjustUp(PQ->element, PQ->n-1); // 新增元素向上调整
}时间复杂度$O(log_2n)$
取出优先权最高队列
void Serve(PriorityQueue *PQ, ElemType *x)
{
if(IsEmpty(PQ)) // 空队
return;
*x = PQ->element[0]; // 栈顶元素赋值
PQ->n--; // 元素个数-1
PQ->element[0] = PQ->element[PQ->n]; // 用堆尾替代堆顶元素
AdjustDown(PQ->element, 0, PQ->n-1); // 向上调整
}时间复杂度$O(log_2n)$
树的应用
二叉搜索树BST
存储方式
- 左子树小于根结点
- 右子树大于根结点
- 若以中序遍历二叉搜索树,将得到递增有序序列
性质
- 高度(搜索次数):$\lceil\log_2(n+1)\rceil\le h\le n$
代码
搜索
查找关键字$x$
- 二叉树为空,搜索失败
- 将$x$与根结点比较
- $k$小于该结点,搜索左子树
- $k$大于该结点,搜索右子树
- $k$等于该结点,搜索成功
递归算法
BSTNode *Find(BSTNode *T,KeyType key)
{
if(!T)
return NULL; // 搜索失败
if(T->data == key)
return T; // 搜索成功
if(T->data < key)
return Find(T->lChild, key);
return Find(T->rChild, key);
}迭代算法
BOOL BtSearch(Btree Bt,KeyType k,T *x)
{
BTNode *p = Bt.Root; // 从根结点出发
while(p)
{
if(k < p->element.key) // 从左分支继续向下搜索
p = p->lChild;
else if(k > p->element.key) // 从右分支继续向下搜索
p = p->rChild;
else
{
*x = p->element; // 搜索成功
return TRUE;
}
}
return FALSE;
}插入
- 向下搜索$x$
- 搜索失败处插入$x$
递归
int BSTInsert(BiTree &T, KeyType key){
if(T == NULL){ // 树为空,创造空间插入结点
T = (BiTree)malloc(sizeof(BSTNode));
T->key = k;
T->lchild = T->rchild = NULL;
return 1; // 插入成功
}else if(k == T.key) // 存在了相同关键字,插入失败
return 0;
else if(k < T.key) // 插入到左子树
return BSTInsert(T->lchild, k);
else // 插入右子树
return BSTInsert(T->rchild, k);
}非递归
BOOL Insert(Btree *bt, T x)
{
BTNode *p = bt->root, *q, *r; // p:从根节点向下搜索 q:记录搜索失败上一层结点
KeyType k = x.key;
while(p)
{
q = p;
if(k < p->element.key)
p = p->lChild;
else if(k > p->element.key)
p = p->rChild;
else
return FALSE;
}
}删除
删除叶子结点
直接删
- 将待删除结点双亲结点指向NULL
- 释放待删除结点
删除有一个孩子结点
爷带孙
- 待删除结点的双亲结点指向待删除结点的孩子
- 释放待删除结点
删除有两个孩子结点
- 从后代选择一个覆盖待删除结点
- 保持二叉搜索树有序性==左孩子$\leq$代替这$\leq$右孩子==
- 容易删除==只有一个孩子或没有孩子==
- 删除重复的代替者
代替者选择方法
- 选择其中序遍历的直接前驱
- 为左子树最大值
- 一定没有右孩子
- 选择其中序遍历的直接后驱
- 为右子树最小值
- 一定没有左孩子
二叉平衡树
定义
- 二叉搜索树
- 左右子树高度差$h’\leq{1}$
- 左右子树都是二叉平衡树
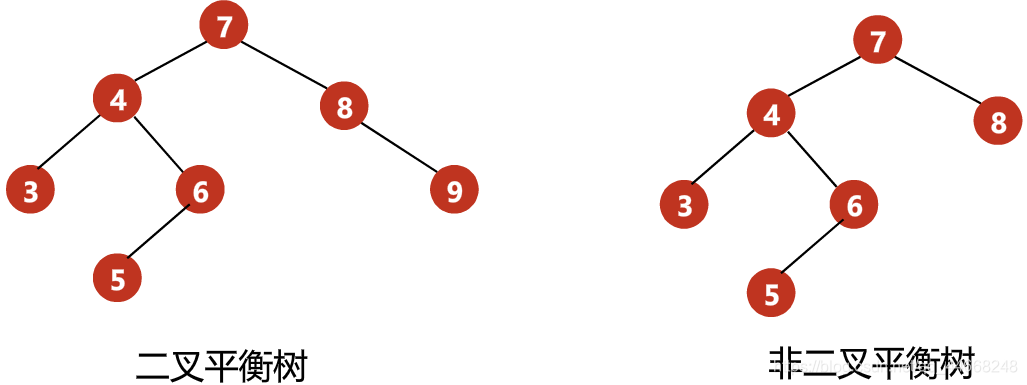
- 平衡因子——左子树与右子树高度差$h_{left}-h_{right}$
性质
- 最少结点:$n_h=\left\{ \begin{array}{l} 0\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ h=0\\ 1\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ h=1\\ 2\ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ \ h=2\\ 1+n_{h-1}+n_{h-2}\ \ \ \ h\ne0,1,2 \\ \end{array} \right. $
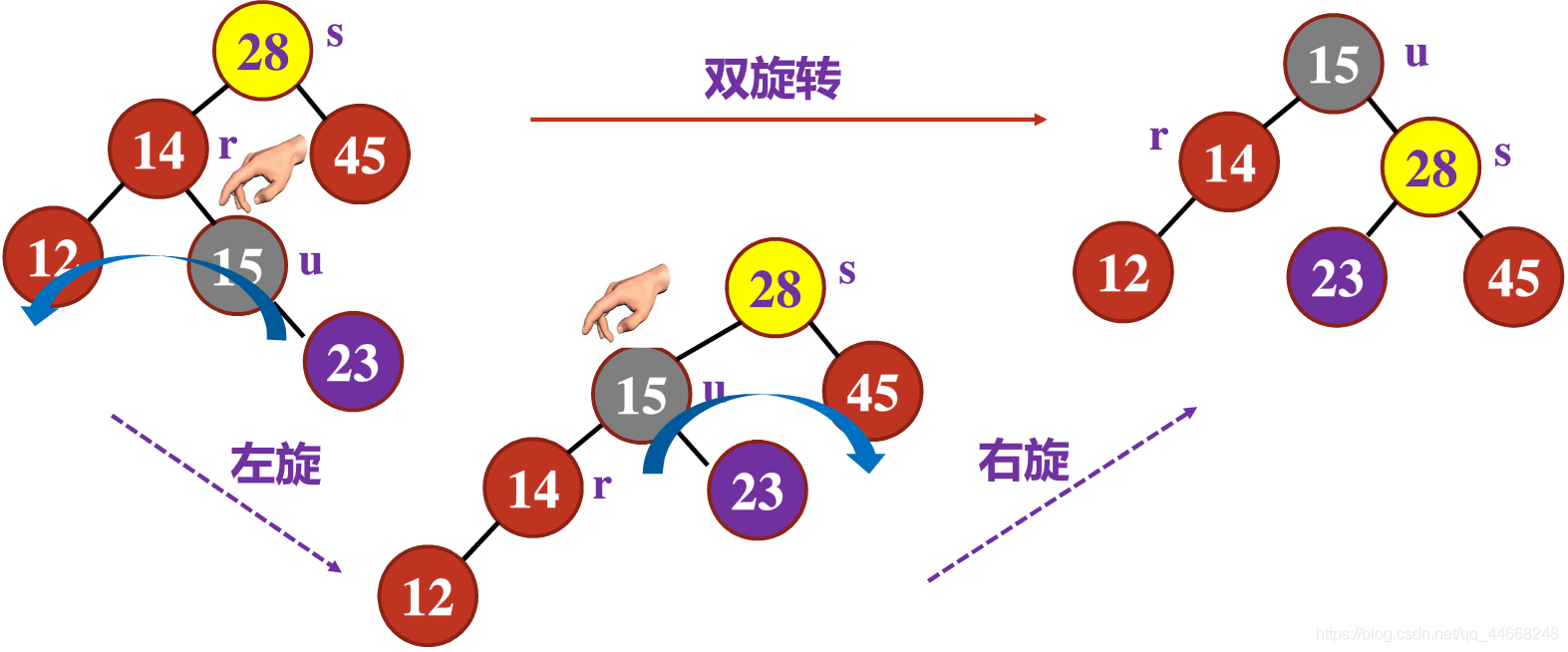
二叉平衡树插入
先按照普通二叉搜索树插入
若不平衡,则进行调整
先找到平衡因子超过$1$的根结点$s$
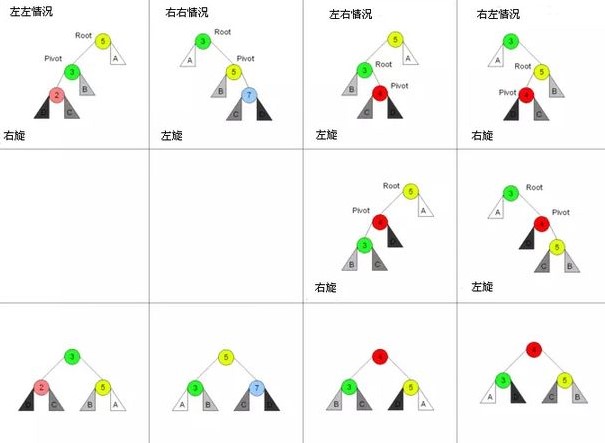
$LL/RR$类型——单旋转
新结点插入$s$的左/右结点
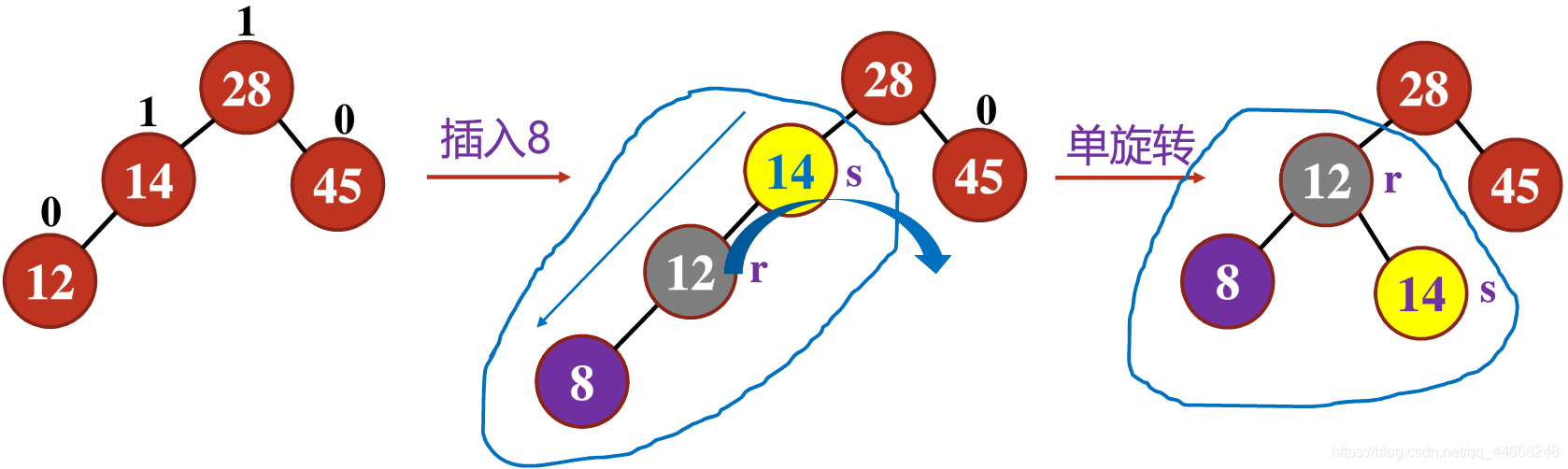
$LR/RL$类型——双旋转
哈夫曼树
性质
- 哈夫曼树只有度为$0$和$2$的结点
- $n$个叶子结点共$n-1$非叶子结点
- 叶子结点:$(n+1)/2$
树路径长度
$E=I+2n$
$I$——内路径长度
根到分支结点路径和
$E$——外路径长度
根到叶子的路径长度
加权路径长度
$WPL={\sum}_{k=1}^mw_kl_k$
- $m$——叶结点数量
- $w_k$第$k$个叶结点权值
- $l_k$该叶结点路径长度
- $WPL$——文本最终转换成编码的总编码长度
哈夫曼树
- 哈夫曼树是最小加权路径长度的扩充二叉树
- 分支节点权值$=$左孩子权值$+$右孩子权值
- 对于$m$叉哈夫曼树,若$(n-1)%(m-1)=u\ne 0$,则需补充$m-u-1$个$0$叶结点
实现方法
- 选取最小的两个值
- 求和形成新的值,并与剩下的最小的求和
代码
BinaryTree CreateHFMTree(int w[], int m)
{
BinaryTree x,y,z; // 二叉树变量
Create(PQ,m); // 初始化优先权队列PQ, 优先权存在根结点数据域
for(int i=0 ; i<m ; i++)
{
MakeTree(x,w[i],NULL,NULL); // 创建仅包含根结点二叉树,权值w[i]存入根结点
Append(PQ,x); // 将二叉树x插入优先权队列
}
while(PQ.n > 1)
{
Serve(PQ,x); // 从PQ中取出根结点权值最小的二叉树,存入x
Serve(PQ,y); // 从PQ中取出根结点权值最小的二叉树,存入y
}
/*合并二叉树x,y*/
if(x.root.element < y.root.element) // 左子树结点权值小于右子树
MakeTree(z, x.root.element+x.root.element, x, y);
else
MakeTree(z, x.root.element+x.root.element, y, x);
Append(PQ, z); // 新合成新二叉树z插入优先权队列
Serve(PQ, x); // 获取优先权队列唯一二叉树,存入x,该二叉树即哈夫曼树
return x;
}哈夫曼编码
- 左0右1
- 前缀编码:集合中元素不得为另一元素的前缀
- 编码对应哈夫曼树元素无子树
考点
线索二叉树
哈夫曼树
二叉树的确定
二叉树的估计
将对应序列用T、L、R表示
- 前序遍历与后序遍历相同:TLR、LRT
- 前序遍历与中序遍历相同:TLR、LTR
- 中序遍历与后序遍历相同:LTR、LRT
- 前序遍历与后序遍历相反:TLR、LRT
- 前序遍历与中序遍历相反:TLR、LTR
- 中序遍历与后序遍历相反:LTR、LRT
二叉树表达式